Projects/Competitions

Eyantra Robotics Competition, Theme - Functional Weeder
Developed a robotics solution for the e-Yantra Robotics Competition 2021-22, incorporating pathfinding (A* algorithm) and obstacle avoidance in Elixir, along with real-time communication using the Phoenix Web Framework for a LiveView of the robot's arena. Implemented PID-based Line Following, designed arm mechanisms for sowing and weeding, and secured 4th place globally among 250+ teams.
OptiDepth
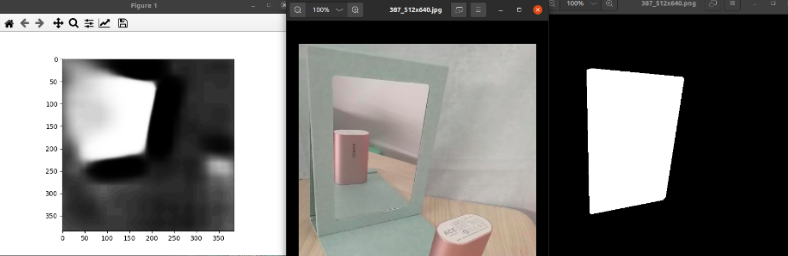
OptiDepth is an advanced joint model designed to overcome challenges in real-time depth estimation, particularly on reflective surfaces like glass and mirrors. Leveraging Quantization-Aware Training (QAT) and Post-Training Quantization (PTQ), it optimizes models such as MirrorNet and GDNet, reducing memory usage by 62% and 70%, respectively, while improving computational efficiency. This enables faster inference on edge devices like the OAK-D camera, making it ideal for applications requiring real-time depth perception in complex environments.

Sketch-2-Paint
A Conditional Generative Adversarial Network (CGAN) which accepts a 256x256 px black and white sketch image and predicts the colored version of the image without knowing the ground truth.

Street-Racer-2D
A Gesture-controlled 2D Car Racing game using phaser.js and OpenCV

AirMouse
A virtual mouse system using Web camera to interact with the computer in a user friendly manner